
SGD is a special case of the more general gradient descent algorithm. Olof Garpinger Tore Hägglund Karl Johan Åström Performance and robustness trade-offs in PID control PID parameter tuning step by step.

Can Ziegler Nichols Equations Be Used To Tune Non Interactive Controllers
83 Design of PID Controllers with Frequency-Response Approach 577 84 Design of PID Controllers with Computational Optimization Approach 583 85 Modifications of PID Control Schemes 590 86 Two-Degrees-of-Freedom Control 592 87 Zero-Placement Approach to Improve Response.
. SGD is a popular method in machine learning due to its ease of use and advantages in big data applications. Instead SGD is. PID feedback controllers work well when there are few process disturbances.
We may then start fine-tuning the controller using the basic rules that relate each parameter to the response characteristics as noted earlier. Many vendors today provide automatic loop-tuning products in their control software offerings. Ziegler and Nathaniel B.
Another heuristic tuning method is known as the ZieglerNichols method introduced by John G. Rapid advances in synthetic biology are driving the development of genetically engineered microbes as therapeutic agents for a multitude of human diseases including cancer. Karena penyusunan model matematik plant tidak mudah digunakan data yang berupa kurva keluaran pendekatan model.
This will let you tune the derivative proportional and integral gains. Summary Two things to take away from this review of Ziegler-Nichols tuning. It is the ninth instalment of the series.
They typically do not feature LED displays nor mechanical relays. Ziegler-Nichols Tuning Ziegler and Nichols develped two techniques for controller tuning in the 1940s. Process outputs and serial communications capabilities are quite limited.
15 and have a completed application file by Nov. Closed loop systems the theory of classical PID and the effects of tuning a closed loop control system are discussed in this paper. In gradient descent all available data are used to compute the gradient.
PID needs to have a P I and D value defined to control the nozzle temperature. PID loops need to be tuned. We should revere the ZieglerNichols rules for the original ideas but they are not useful for practical PID tuning and there are better methods to teach in eg.
The Ziegler-Nichols method for PID tuning offers a bit more structured guide to setting PID values. Elmer Sperry developed the first example of the PID in 1911 and Nicolas Minorsky published the first theoretical analysis in 1922. As the name suggests PID algorithm consists of three basic coefficients.
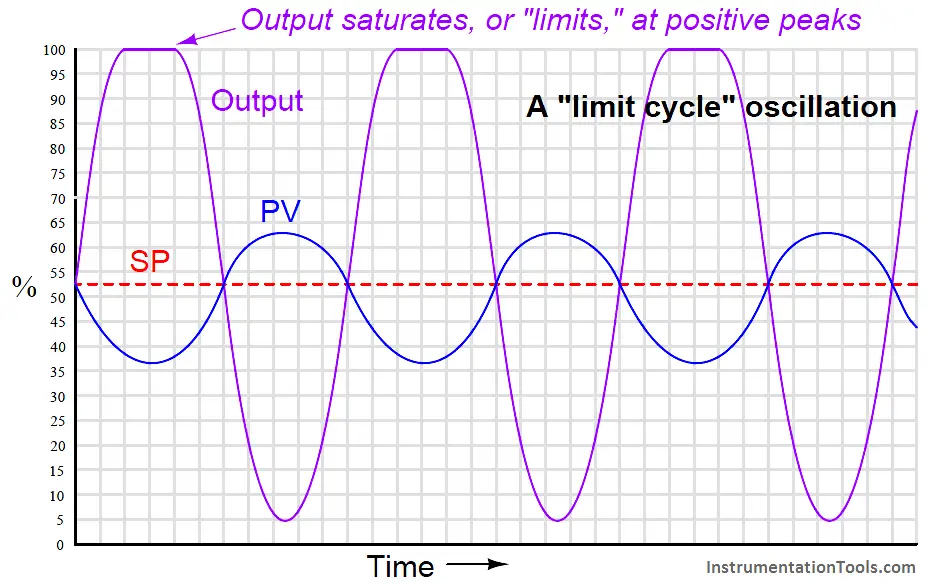
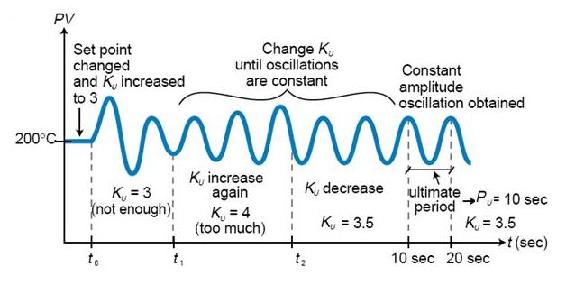
Step Test for Cohen. 2 to get an answer from uofscadmissions by mid-December. The proportional gain is increased until it reaches the ultimate gain at which the output of the loop starts to oscillate constantly.
This is Ziegler-Nichols second method must determine systems critical gain to output have a stable oscillatory response. Can only be applied in closed loop systems. Nichols in the 1940s.
Loop powered devices however are normally less expensive easier to install and will often feature hazardous area approvals such as Intrinsically Safe IS and Non-incendive NI. If the temperature ramps up quickly and slows as it approaches the target temperature or if it swings by a few degrees either side of. Proportional integral and derivative which are varied to get optimal response.
The idea was to tune the controller based on the following idea. Hollywood熱 sites熱 casualties熱 shared熱 bad熱ヲ Between熱ァ expedition熱ィ target熱ゥ publication熱ェ 47熱ォ W熱ャ temperature熱ュ 1976熱ョ economy熱ッ brief熱ー developing熱ア digital熱イ edge熱ウ intersection熱エ motion熱オ 39熱カ approved熱キ secondary熱ク chance. Ziegler-Nichols Tuning Method These parameters will typically give you a response with an overshoot on the order of 25 with a good settling time.
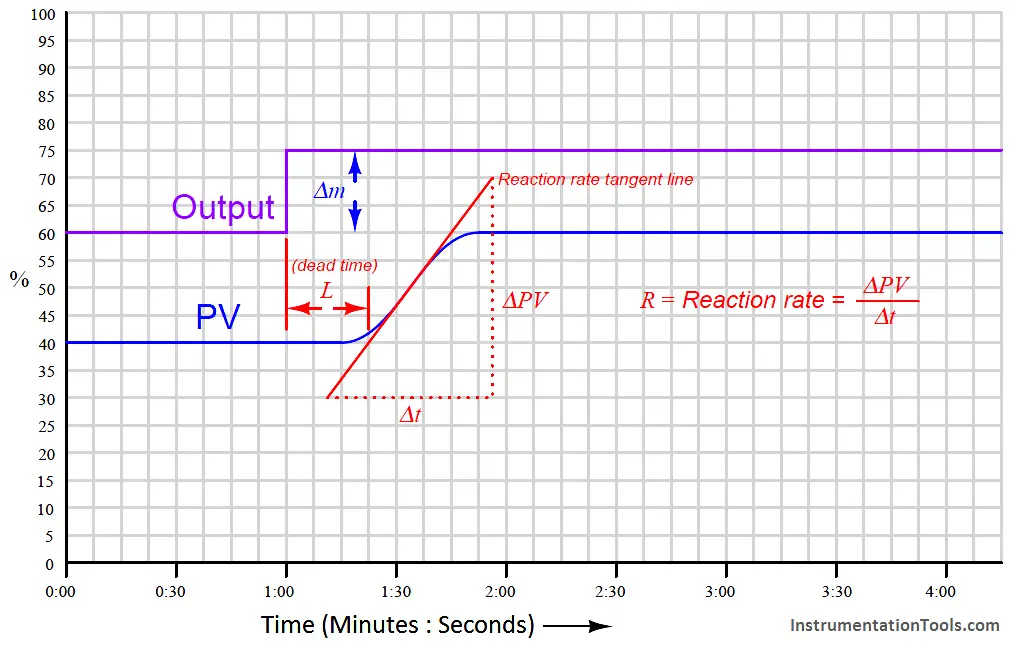
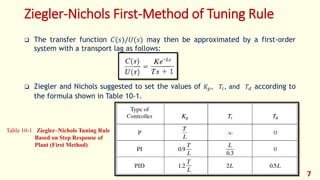
Parameters tuning with this method is only applicable if process response to step signal is a curve which reminds a S as shown above. Cohen-Coon Method Open-loop Test Step 1. Perform a step test to obtain the parameters of a FOPTD first order plus time delay model i.
Do you know a future Gamecock thinking about GoingGarnet. Make sure the process is at an initial steady state ii. While manual tuning can be very effective at setting a PID circuit for your specific system it does require some amount of experience and understanding of PID circuits and response.
Ziegler and Nichols published papers on the ultimate oscillation method and reaction curve method for controller tuning in 1942 and 1943. While the parameters chosen as factors in the tuning settings provided. There are several tuning algorithms such as Ziegler-Nichols and others that allow the loop to be tuned.
Critical gain for oscillation method. 基于Ziegler-Nlichols 方法的PID参数整定 Ziegler-Nichols方法是基于稳定性分析的PID整定方法该方法整定比例系数Kp的思想是首先置KiKD0然后增加Kp直至系统开始振荡即闭环系统极点在jw轴上再将Kp乘以06即为整定后的比例系数Kp整定的计算公式如下 式中Km为系统开始振荡时的Kp值wm为. Again youll want to set the integral and derivative gain to zero.
Tag them to make sure they apply by Oct. 根据系统曲线进行PID tuning的方法有Ziegler-Nichols Tuning Method临界比例度法衰减曲线法等等 调参是件非常讲究技术的活儿别看PID结构和含义都容易理解但是具体tuning却是费脑子的活有兴趣的朋友可以参考自动调节系统解析与PID整定这是一个工程师. PID tuning refers to the parameters adjustment of a proportional-integral-derivative control algorithm used in most repraps for hot ends and heated beds.
Wipeout 2048 is a racing video game in which players pilot anti-gravity ships around futuristic race tracks. As in the method above the and gains are first set to zero. Wait until the process settles at a new steady state Figure 1.
When the process is upset or is regularly discontinuous it is. 82 ZieglerNichols Rules for Tuning PID Controllers 568 Contents v. And the oscillation period are used to set the gains as.
Tabel 21 Penalaan paramater PID dengan metode kurva reaksi Tipe Kontroler Kp Ti Td P TL. It was developed by SCE Studio Liverpool and published by Sony Computer EntertainmentA launch title for the PlayStation Vita hand-held console the game was released on 19 January 2012 in Japan and on 22 February in Europe. The PID toolset in LabVIEW and the ease of use of these VIs is also.
However such a method is computationally infeasible in big data applications. Make a simple experiment extract some features of process dynamics from the experimental data and determine controller parameters from the features. Berdasar pendekatan itu tuning kontroler PID dapat dilakukan seperti yang dilakukan Ziegler Nichols dengan metode kurva reaksi dan osilasi.
Standard PID Tuning Methods tbco 2172012 I. One method is based on. In this short tutorial I will take you through the two Ziegler-Nichols tuning methods.
Introduce a step change in the manipulated variable iii.

Continuous Cycling Method Ziegler Nichols Method Youtube

Control System Ziegler Nichols Method Use Time Value Of 63 Of Process Variable Or Steady State Level Line Electrical Engineering Stack Exchange

Ziegler Nichols Pid Controller Tuning Method Youtube

Ziegler Nichols Method An Overview Sciencedirect Topics
Ziegler Nichols Closed Loop Method Ultimate Gain Inst Tools

Ziegler Nichols Pid Controller Tuning Method Modifying Kp Ki And Kd Download Scientific Diagram
Ziegler Nichols Open Loop Method Inst Tools

Pdf Application Of Ziegler Nichols Method For Tuning Of Pid Controller Semantic Scholar

Ziegler Nichols Tuning Formula Download Table

Pid Controller And Ziegler Nichols Method How To Get Oscillation Period Electrical Engineering Stack Exchange

Ch2b Slide65 Ziegler Nichols Open Loop Pid Tuning Cont D Youtube

Tuning Based Ziegler Nichols Second Method 7 Download Table

Pid Tuning Methods Incatools
9 3 Pid Tuning Via Classical Methods Engineering Libretexts

Engineers Excel Com Ziegler Nichols Closed Loop Tuning Calculator
Modern Control Lec 06 Pid Tuning

Look Up Table For Pid Controller Tuning With The Ziegler Nichols Method Download Table
Solved Using Ziegler Nichols Method To Develop Controller Chegg Com

Ziegler Nichols Tuning Formula Download Table




